Telepathy is a D-Bus API.
Telepathy components conform to the
Telepathy D-Bus Specification,
which is therefore also the main Telepathy API reference.
D-Bus is an IPC
(Inter-process communication) system, allowing different software
components running in different processes and implemented in different
programming languages to communicate. D-Bus is primarily used as a
server/client architecture, but one-to-one communication via a private
bus is also possible. D-Bus is the defacto standard IPC mechanism for
Linux.
Most of the Telepathy examples in this book will use a
language binding
instead of using D-Bus directly. However, an understanding of D-Bus is
very helpful when learning Telepathy.
-
Message Bus
-
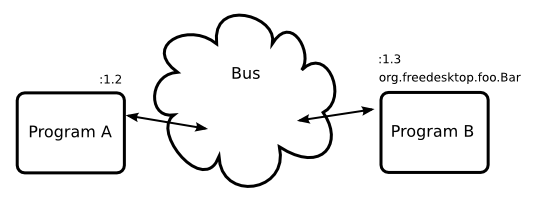
A message bus is a bus that D-Bus messages are transmitted over,
brokered by a D-Bus daemon. There are two main buses that
programs communicate with: the system bus
(for machine wide services, e.g. HAL, NetworkManager, Avahi) and
the session bus (for user/session specific
services, e.g. notification messages, Telepathy, desktop session
management).
-
Unique Name
-
This is an identifier assigned to a client by the D-Bus daemon
(e.g. :1.3). Every client on the D-Bus has one, whether or not
it is offering a named service.
It is an analagous to an IP address in computer networking.
-
Well-Known Name
-
A process can make a service available by connecting to a
D-Bus bus and requesting a
"well-known" bus name for the
connection (this is sometimes referred to as a
service name),
by which other processes, such as applications, can
access it.
If unique names are analagous to IP addresses, then
well-known names are like a DNS name.
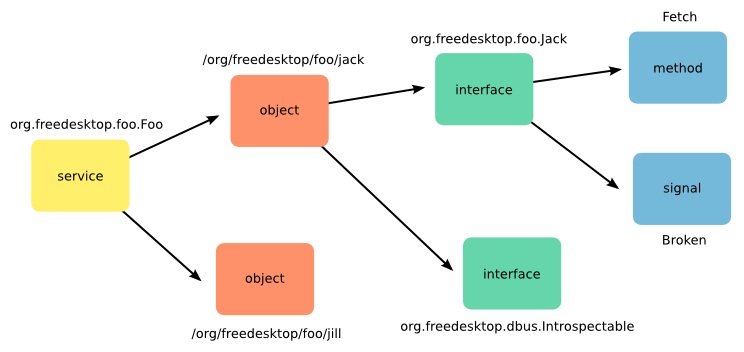
The example in
Figure 2-2 provides
the well-known bus name "org.freedesktop.foo.Foo".
-
Object Path
-
The service process provides D-Bus objects on that bus name.
Each object has an object path, such as
"/org/freedesktop/foo/jack"
(Figure 2-2),
which a client application must specify to use that object.
-
Interface Name
-
Each D-Bus object implements one or more D-Bus interfaces.
Each interface has an interface name, such as
"org.freedesktop.foo.Jack"
(Figure 2-2).
Each interface provides one
or more methods or signals, each with a member name.
-
Method
-
A D-Bus interface can expose a number of methods that can be
called by a client. They have parameters and return types that
are given as a D-Bus type signature.
Figure 2-2 gives the
example of the "Fetch" method (telling Jack to fetch a
pail of water).
-
Signal
-
A D-Bus interface can also expose a number of signals that can be
connected to by a client. Connecting a signal involves
providing a callback that matches the signal's type signature
that can be called by the mainloop (unlike
UNIX signals, D-Bus signals are not asynchronous).
Figure 2-2 gives the
example of the "Broken" signal (which is triggered
when Jack falls down and breaks his crown).
-
Property
-
D-Bus objects implementing the org.freedesktop.DBus.Properties
interface may also expose typed properties.
Always Avoid Synchronous D-Bus Calls
The D-Bus
specification defines D-Bus as an asynchronous
message-passing system, and provides no mechanism for blocking calls
at the protocol level. However libdbus and most
D-Bus bindings (dbus-glib, dbus-python and QtDBus) provide a
"blocking" API
(dbus_do_something_and_block) that implements a
"pseudo-blocking" behaviour. In this mode only the D-Bus
socket is polled for new I/O and any D-Bus messages that are not the
reply to the original message are put on a queue for later
processing once the reply has been received.
This causes several major problems:
-
Messages can be reordered. Any message received before the reply and
placed on the queue will be delivered to the client after the reply,
which violates the ordering guarentee the D-Bus daemon provides.
This can cause practical problems where a signal indicating an
object's destruction is delayed. The client gets a method reply
"UnknownMethod" and doesn't know why until the signal is
delivered with more information.
The client is completely unresponsive until the service replies
(including the user interface). If the service you're calling into has
locked up (this can happen, even in services that are designed to be
purely non-blocking and asynchronous), the client will be
unresponsive for 25 seconds until the call times out.
The client cannot parallelize calls — if a signal causes
method calls to be made, a client that uses pseudo-blocking calls
can't start processing the next message until those method calls
return.
-
If two processes make pseudo-blocking calls on each other, a
deadlock occurs.
This sort of scenario occurs with plugin architectures and shared
D-Bus connections. One plugin "knows" it's a client, not a service;
and another plugin, sharing the same connection, "knows" it's a
service, not a client. This results in a process that is both a
service and a client (and hence deadlock-prone).
A D-Bus bus is shared with lots of other clients and services, some of
which will not have been thought of yet. It is important to ensure
that your well-known names, objects and interfaces all have unique
names.
When choosing a well-known bus name, object name or interface name
it is best practice to use a reversed domain name (as
is done for Java packages) to avoid possible conflicts.
For example for well-known bus names or interfaces:
- org.freedesktop.Telepathy.ConnectionManager
- org.gnome.Project
- com.mycompany.MyProduct
For objects:
- /org/freedesktop/Telepathy/ConnectionManager/gabble
- /org/gnome/Project/adaptor
- /com/mycompany/MyProduct/object0
For simple services, with just one object that provides just one
interface, these three names will often look very similar.
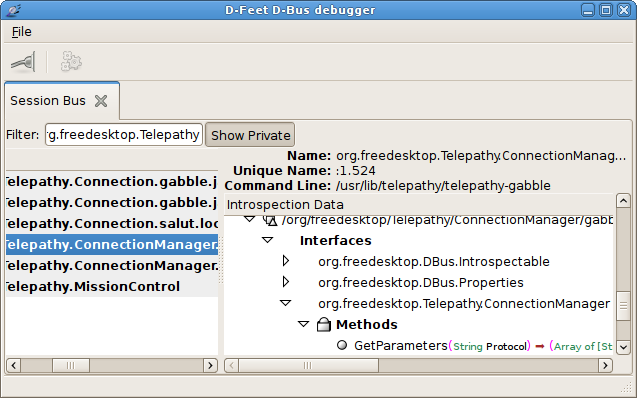
Many services on a D-Bus bus provide a mechanism to introspect their
available objects and associated interfaces. A good utility for doing
this in an interactive way is
D-Feet.
D-Feet shows each service connected to the bus and the objects,
interfaces, methods and signals available for that service.
It allows (synchronous) method calls to be made.
D-Bus methods and signals are strongly typed with types given by a
D-Bus type signature. The complete documentation for D-Bus type
signatures is presented in the
D-Bus specification.